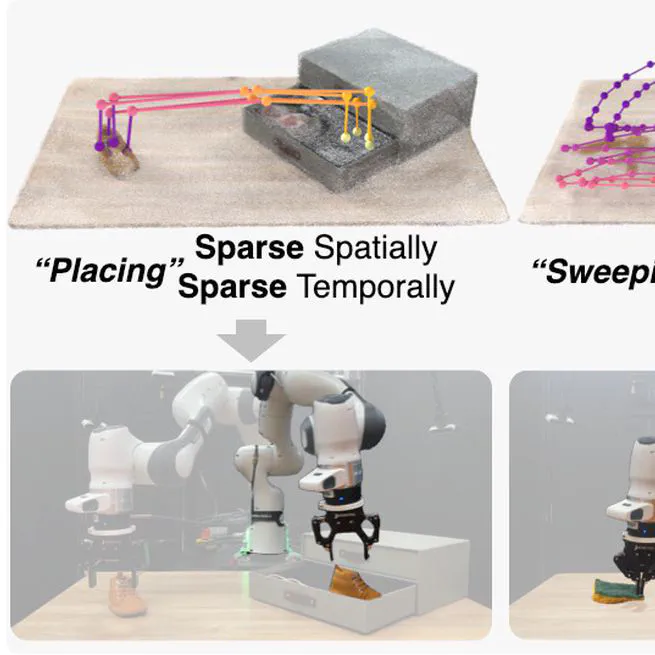
Correspondence-Oriented Imitation Learning: Flexible Visuomotor Control with 3D Conditioning
We propose a method for learning robot manipulation policies in a self-supervised manner using a flexible 3D-based task representation.
Oct 30, 2025
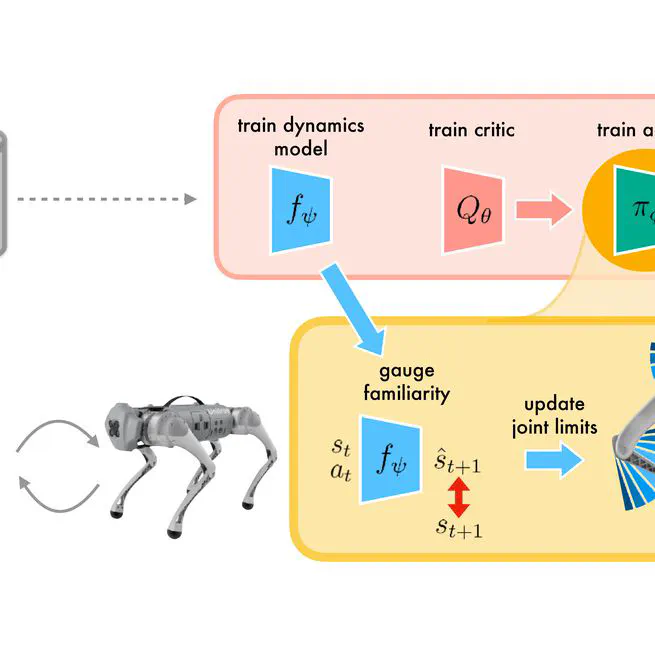
Grow Your Limits: Continuous Improvement with Real-World RL for Robotic Locomotion
We propose a method for dynamically adjusting a robot’s exploration while learning in the real world. We demonstrate that growing the limits of the robot’s search space leads to safer, more efficient learning and enables continuous improvement.
May 13, 2024