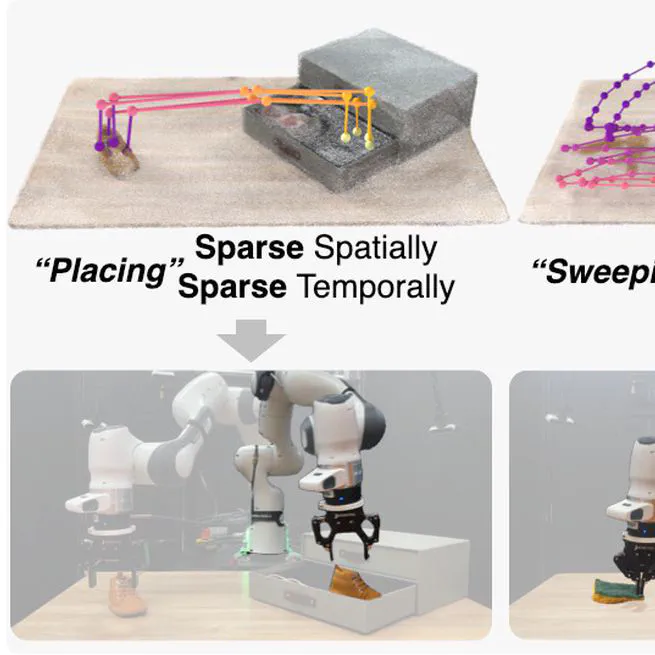
We propose a method for learning robot manipulation policies in a self-supervised manner using a flexible 3D-based task representation.
Oct 30, 2025