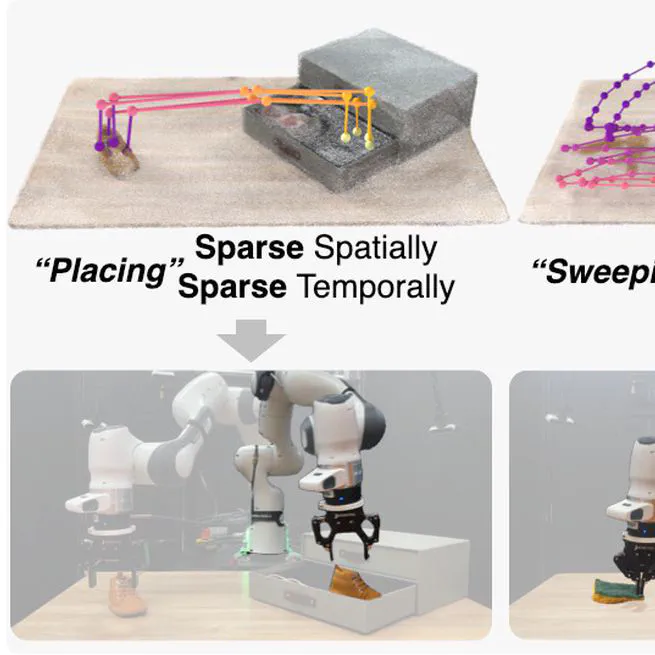
Correspondence-Oriented Imitation Learning: Flexible Visuomotor Control with 3D Conditioning
We propose a method for learning robot manipulation policies in a self-supervised manner using a flexible 3D-based task representation.
Oct 30, 2025
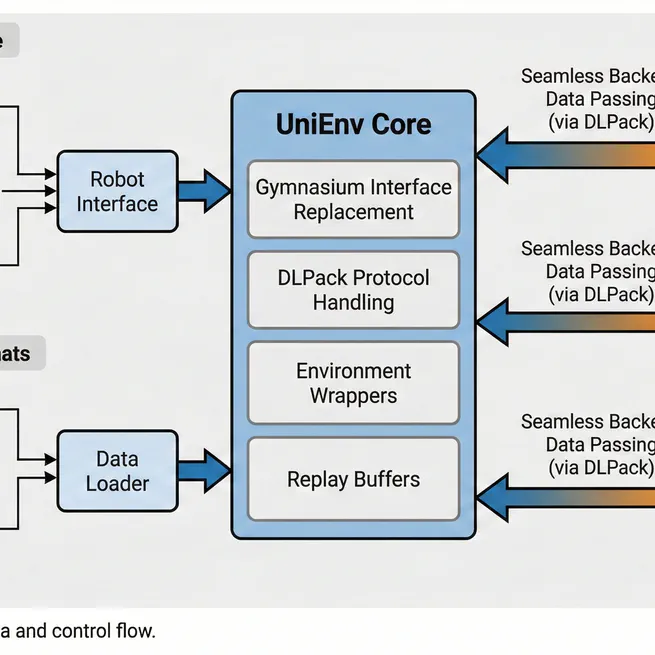
UniEnv: Unifying Robot Environments and Data APIs
Modern robotics research stands at a point where the pace of algorithmic innovation is often throttled by the fragmentation of the ecosystem. While the demand for general-purpose robot learning requires rapid evaluation and training across diverse scenarios, the current landscape is deeply divided. Researchers are frequently forced to navigate a disjointed collection of simulation environments, real-world hardware interfaces, and static dataset formats, each operating within isolated silos. This fragmentation is further compounded by the incompatibility of underlying computational frameworks. The divide between major tensor backends—such as PyTorch, JAX, and NumPy—often creates artificial barriers, forcing tedious data conversion and creating significant overhead during training loops. Furthermore, the lack of a standardized interface between disparate robot data formats (e.g., Open-X-Embodiment, Droid) and active environments complicates the utilization of large-scale pre-training data. UniEnv is designed to directly tackle these challenges by providing a unified, high-performance toolset for the next generation of robot learning. It serves as a drop-in replacement for standard Gymnasium interfaces but extends functionality to support multiple tensor backends seamlessly. By leveraging the DLPack protocol, UniEnv enables zero-copy data passing between frameworks, effectively removing the friction between simulation, real-world hardware, and deep learning libraries. With a suite of built-in utilities—including optimized replay buffers and environment wrappers—UniEnv offers a single, cohesive API that bridges the gap between diverse data sources and execution backends, empowering researchers to focus on solving complex control tasks rather than fighting integration overhead.
Oct 1, 2025
Cornell CS4756/5756: Robot Learning
Cornell CS4756 is an undergrad/graduate-level course on robot learning algorithms and techniques. The course covers a wide range of topics in deep learning, imitation learning, reinforcement learning, representation learning and robotics.
Jan 20, 2025
Cornell CS6758: Deep Learning for Robotics
Cornell CS6758 is a graduate-level course on deep learning for robotics. The course covers a wide range of topics in deep learning, reinforcement learning, and robotics, with a focus on the intersection of these fields.
Aug 24, 2024
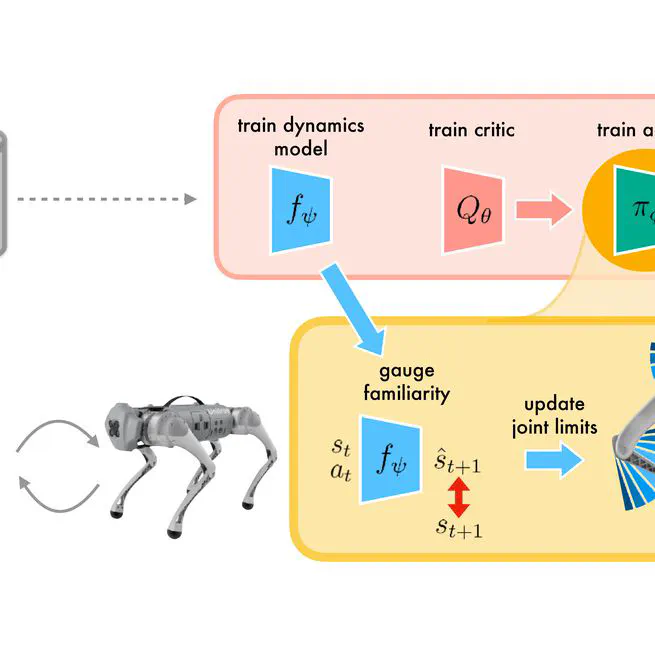
Grow Your Limits: Continuous Improvement with Real-World RL for Robotic Locomotion
We propose a method for dynamically adjusting a robot’s exploration while learning in the real world. We demonstrate that growing the limits of the robot’s search space leads to safer, more efficient learning and enables continuous improvement.
May 13, 2024

ROAR_PY
I led the training and evaluation of a RL-based autonomous racing policy in the Carla Simulator. The agent can drive at 150 km/h in the simulator. In the process, I led the development of ROAR-PY: A streamable, gymnasium compatible control suite that unifies control of vehicles / reading of sensors in simulation and in real world for any autonomous vehicles.
Jun 15, 2023
DarBots
I was very fortunate to gain early exposure to robotics through the DarBots program at Darlington School. I competed as the team captain in the FTC robotics competition for two years.
May 20, 2020